







โปรเจ็คเดือนนี้ที่น่าเล่น 2
วันที่เริ่มทำ 14/05/56
ครั้งนี้ว่างหลังจากช่วง นศ. ปิคเทอมก็เลยหาอะไร เล่นๆมีคนแนะนำว่า ทำmobile robot ตัวเล็กๆ สักตัว
เลยลองทำดู มีแนวคิดว่า เอาง่ายๆหาอุปกรณ์ราคาถูกๆ น้องๆสามารถทำตามได้เลยเกิดมาเป็น
mobile robot ควบคุฒผ่าน JOY PS2แบบ wireless
แจ้งนะครับบทความนี้จะบอกหมดครับไม่หมกเม็ด บอกหมดเปลือกครับ
mobile robot ควบคุฒผ่าน JOY PS2แบบ wireless
เหตุผลที่ใช้ joy PS2แบบ wireless เพราะว่าเมื่อเทียบราคาระหว่าทำ remote ใช้เองกับ joy ราคา joy PS2 wireless สรุปว่าราคา joy ไร้สายแค่ ประมาณ 700บาท แต่
ถ้าทำเอียงจะเสียค่าใช้จ่ายมากกว่าเลยเอาจอย เกมส์ดีกว่า และอีกอย่างนึง ก็จะได้ทำการสอนการเขียนโปรแกรม arduino + JOY PS2ให้ได้นำไปต่อยอดด้วยครับ
มาดูกันนะครับ ว่า มี Hard ware อะไรบ้าง
1 กระดูกงูเล็ก มือสอง 300 บาท 2ชิ้น ยาวประมาณ 60 cm
2 dc motor 50-100 rpm 2ชิ้น
3 แป้นลูกปืน แกน 8 mm ราคา 95 บาท 2ชิ้น
4 แหวนล็อก 35 บาท 2ชิ้น
5 แกนเหล็ก 8 mm ยาว 30 cm 1ชิ้น
6 กล่องเหล็ก 1 กล่อง 350 บาท
7 ล้อโรลเลอร์เบรด พร้อมแป้นยึด 380 บาท 2 ล้อ
8 แบริ้ง 2 ล้อ 35*2 บาท
9 ล้อโรลเลอร์เบรด แบบปล่าวๆ
10 ที่รองล้อเหล็ก 45 บาท ต้องใช้ 6 ชิ้น
นี้เป็นแค่บางอย่างเดี๋ยว อัฟขึ้นเลื่อนๆ นะครับ


มาเริ่มทำกันเลยครับ อย่าแรกก็มาเจาะรู ยึดmotor กันก่อนนะครับ
โดยกล่องที่ซื้อมานั้นจะมีฝามาให้ ถอดมาออกแล้ววางมอเตอร์แล้วก็เจาะรูให้ตรงกับแกนมอเตอร์และตัวยึดครับยามรูปครับ ทำแบบนี้ทั้ง2 ด้านครับ

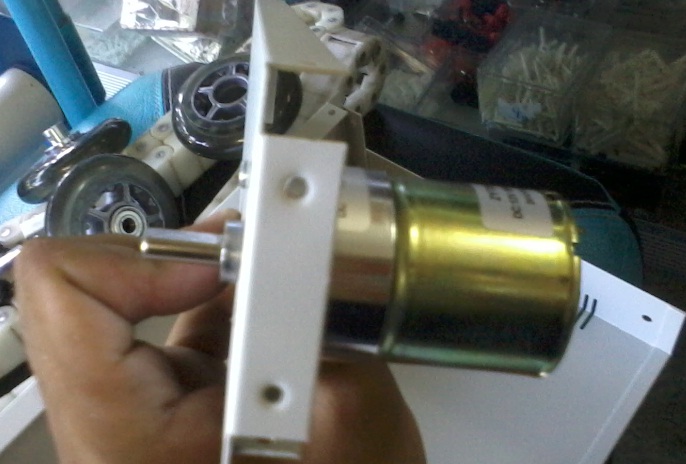
เมื่อเจาะรูยึดมอเตอร์เสร็จแล้วต่อมา มาเจาะยึดกับแป้นลูกปืนก่อนเจาะนะครับ ต้องดูก่อนนะครับว่าเมื่อเรานำกระดูดงูมาใส่แล้ว สายของกระดูดงูต้องตึง หรือทำให้ตัวแป้น
ปรับความตึงก็ได้ พูดแล้วอาจจะงง ดูตามภาพนะครับ

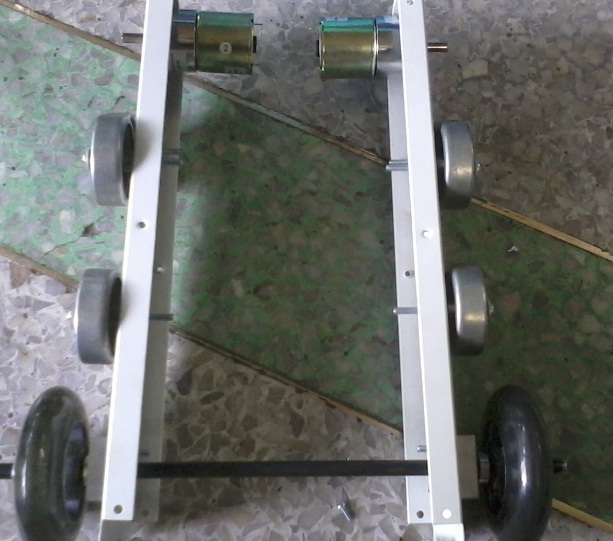
เสร็จแล้วก็นำ ล้อมาใส่เพื่อเตรียมวัดขนาดครับ

ภาพต่อมาเป็นภาพ ล้อส่วนหลังที่ต่อ จะเห็นได้ว่าจะต่อกับแป้น และแหวนล็อกแล้วก็นำล้อปล่าวๆ ที่ใส่เฉพาะลูกปืนมาใส่

เสร็จแล้วก็นำกระดูก งูมาใส่ครับแล้วปรับระยะมอเตอร์เพื่อไม่ให้กระดูกงูหย่อน

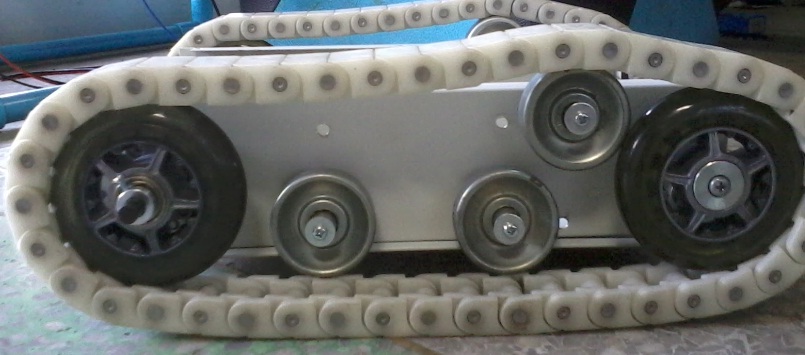
ต่อมา มาใส่ตัวพยุงสายพานกัน ไม่เเน่ใจว่าเรียกถูกหรือปล่าวนะครับถ้าผิดก็ขออภัยด้วยนะครับ
ขอเรียกว่าตัวพยุง จะใส่ฝั่งละ3 ล้อนะครับแล้วแต่เลยนะครับว่าคุณจะใส่ข้างละกี่ล้อ ดูตามภาพนะครับ

ทำทั้ง 2 ข้่างให้เหมือนกัน
เมื่อเอาทั้งสองฝั่งมาต้งคู้กัน
ต่อนะครับก็นำแผ่นฐานด้านล่างของกล่องมาใส่ครับ
และก็นำกระดูดงูใส่ต่อเลยครับ ตามภาพครับ

ช่วงนี้ ทำ Hard ware ไปก่อนนะครับเดี๋ยวพอโครงสร้างเสร็วแล้วค่อยมาทำตัว วงจรและ software กันนะครับ วันนี้ก็แค่นี้ก่อนเดี่ยววันต่อมาจะอัฟข้อมูลให้ต่อนะครับ
วันนี้มาทำกัยต่อนะครับ 20/05/56
หายไปสองสามวันครับ เลยมาต่อตรงส่วน ultrasonic + servo ครับ อย่าวงแรกก็เจาะกล่อง หากล่องเล็กมาทำเป็นตัวใส่ servo ครับครับตามรูปครับ
วัดให้ได้ขนาดของหัว ultrasonic นะครับ
บางคนถาม ultrasonic เอามาใส่ทำไมในเมื่อเป็นหุ่น manual ควบคุมด้วยมือ
ตอบ ทางเราคิดว่าจะให้ตัวหุ่นมันวิง auto ได้ด้วยครับคือจะให้ตัว ultrasoin ใช้หลบหลีกสิ่งกืดขวางนะครับแล้วต่อ sensor ด้านหลังเพิ่มอีกซะตัวครับ
แล้วอาจจะใส่ sensor ควันกับ sensor เปลวไฟไว้เผื่อเอาไว้ทำหุ่นวิ่งสำรวจแล้วมีเสียงเตือนนะครับ

ต่อมาก็เจาะกล่องอีกกล่องโดยวัดขนาดของเซอร์โว ตะไบให้ได้ขนาดแล้วเอาเซอร์โวใส่ยึดน็อตให้เรียนร้อบครับ

นำตัวกล่องที่มี ultrasonis มายึดกับตัว servo อีกทีครับโดยยึดกับแป้นของservo นะครับ

แล้วก็นำไปวางยึดกับตัวรถของเราครับ
ก็จะได้แบบนี้ครับ


ส่วนโดมกลมๆนั้นเป็นกล้องไรสายครับ outputนั้นเป็น AV ครับกะว่าจะใช้ TV รถยนต์เป็นตัวรับภาพนะครับไม่อยากใช้คอมเป็นตัวรับภาพนะครับใช้คอมรับภาพมันเวลาไปควบคุม
บริเวณภายนอกมันไม่ค่อยสะดวก ครั้งหน้ากะว่าจะใช้ android แสดงผลภาพและควบคุมผ่าน android กันไปเลยครับ
ส่วนวันนี้เอาไว้เท่านี้ก่อนนะครับเดี๋ยวมาต่อวันหน้าครับ